Research Projects |
|
Medical projects Under the supervison of Prof. Miguel Tavares Coimbra & Dr. Manuel João Ferreira
- Diagnosis of Rheumatic Heart Disease Based on Ultrasound Videos.
|
Rheumatic Heart Disease (RHD) is the leading cause of heart valve disease in the developing countries, and it commonly affects the mitral valve. The burden of the RHD related diseases falls onto low-income countries, affecting mainly children and young adults. Early detection is vital to minimize the risk of damage and to take preventive measures. Recently, echocardiography has proved to be the most effective diagnosis tool for the early detection of RHD. The aim of this research line is to develop a diagnostic system which analyses the echocardiography videos, and identifies the pathological cases.
|

|
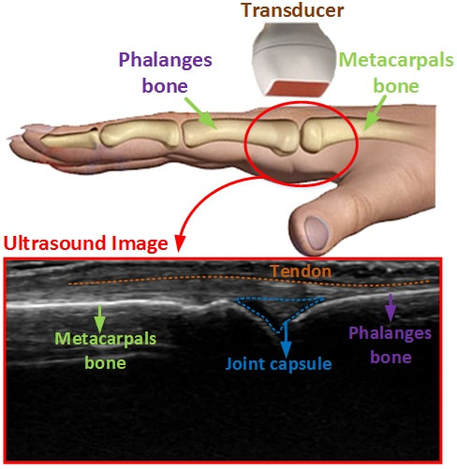
- Development of Algorithms for Detection and Quantification of Rheumatic Diseases in Musculoskeletal Ultrasound.
|
Rheumatic diseases are the main cause of impairment and pain in the developed countries, which makes them a critical social, health and economical problem. Due to its main advantages, ultrasounds are now being used in rheumatology to diagnosis and evaluate rheumatic diseases in early stages. Unlike radiography, which is the current standard, ultrasounds are less expensive, don’t use ionizing radiation and can lead to better outcomes. The difficulties in the interpretation and acquisition of this kind of images reduces its acceptance and, because of that, new and innovative solution need to be created to help the doctors in the diagnosis. The segmentation of the metacarpus and phalangeal bone was achieved using localizing active contours with a confidence of 80% for an error bellow 3 pixels. The extensor tendon was identified with a new open ended active contours method using phase symmetry, prior structure knowledge and genetic optimization.
|
|
- Segmentation of Mitral Valve Regurgitation Jet in Doppler Echocardiography Images.
|
Rheumatic Fever and Rheumatic Heart Disease remain a major burden among children in developing countries. Echocardiography with colour flow Doppler is key to early diagnosis. However, the technique requires time and experienced operators, which are scarce resources in the affected areas. Automatic segmentation of colour Doppler regurgitation jets could, potentially, reduce the cost of screening, and spread diagnostic accessibility for a larger number of patients. Ultrasound processing is very challenging due to speckle noise and similarity of representation of all kinds of tissue. Region-based active contours are suitable tools for the segmentation in cases of intensity heterogeneities, which makes them interesting algorithms for left atrium segmentation. HSV colour space describes colour in terms of hues and saturation, which may facilitate the translation of medical interpretation of the Doppler pseudo-colour into mathematical expression for colour segmentation.
|

|
Robotic projects Under the supervison of Prof. Huang Qiang & Prof. Chen Xiaopeng
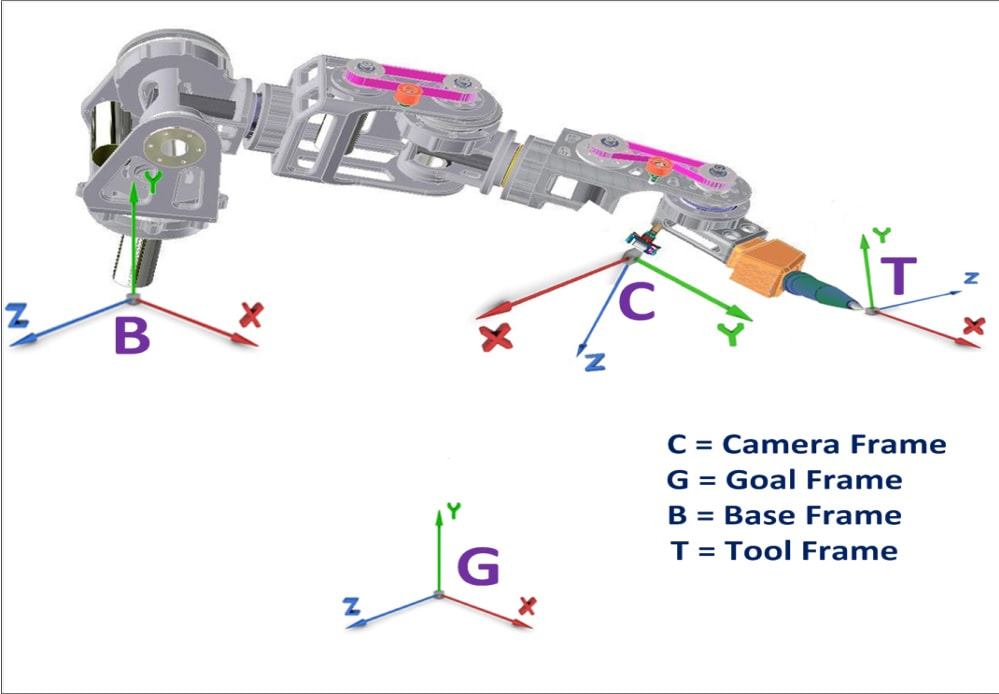
- Hand-eye 3D Pose Estimation for a Drawing Robot
|
In order to draw pictures on a plane, it is important for a robot arm to know the pose of the end-effecter relative to the world frame which is settled on the workplace. Visual servoing is frequently used in the hand-eye configuration of robot arms. However, 3D pose is preferred for a drawing robot. It is not only required to obtain the three dimensional position of the end effecter so that the pen can touch the paper without drilling a hole, but also required to get the direction so that the pen is always perpendicular to the drawing plane. In this paper, we proposed a monocular camera vision system for a 6DOF drawing robotic arm to estimate 3D pose of the end effecter robustly. First, a coplanar asymmetric polygonal landmark, which is a rectangle with a corner cut off to remove rotation ambiguity, is introduced. Second, the corner points of the landmark are indirectly obtained by intersection of the edges obtained using RANSAC. After that, corner points are filtered by KALMAN filter to reduce detection errors. Third, the end effecter's three dimensional pose relative to the world frame is estimated through PnP algorithm and the kinematics of robotics arm.
|
|
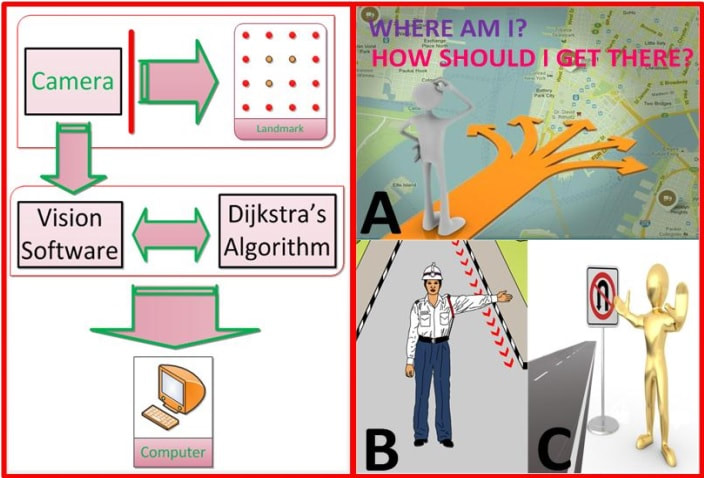
- Vision Guided Path Planning System for Vehicles using Infrared Landmark
|
Infrared-landmark based vision navigation system is proposed to reliably guide drivers from starting point to goal following a feasible shortest path in a known indoor or outdoor environment, no matter whether it is a day or night. What’s more, this system is capable of warning drivers about the dangerous zones “like no right turn, no U-turn, damaged road ahead etc” in conditions when no visible light is available for human beings, mostly at night. The system consists of Basler camera, designed Infra-Red landmark, IR filter, industrial computer and the developed software. Each infrared landmark contains a unique ID. Address information and important notes are attached to each ID. Once a landmark is efficiently detected and its ID is recognized, location information related to the corresponding ID is presented. The Dijkstra’s algorithm is efficiently utilized to find a possible shortest path to destination
|
|
